






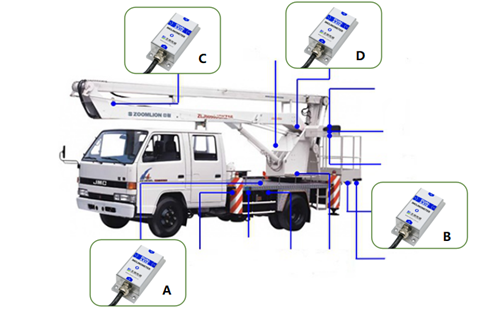

防倾斜开关可以保障工程机械的安全使用。随着智能化的日益普及,工程机械的操作安全成为重中之重的诉求。作业设备的安全生产需要给予足够的重视。其中工程机械的倾斜安全是一项重点,在具有一定高度的设备上,需要严格杜绝倾斜安全隐患,...
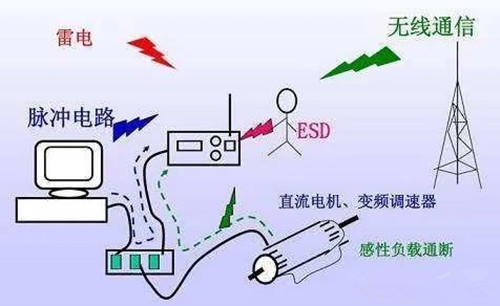
如今自动化智能在生产生活中发挥着越来越重要的作用,尤其在工业领域,角度传感器的身影随处可见。在众多传感器中,模拟量输出的角度传感器占有一席之地。传感器的抗干扰是非常重要,同时是令人头疼的问题。模拟量角度传感器的实际使用中...
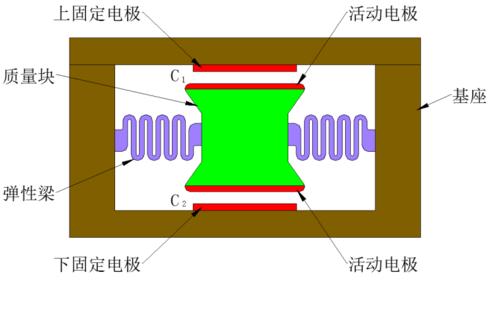
微型加速度传感器是微型传感器的分支,隶属于微机电技术领域,一直以来都是热门且具有现实意义的研究课题。采用微机电技术的微型加速度传感器使用寿命长、成本低、体积重量小,综合性能大大优于常规的加速度传感器,无论在民用还是军用领...

常见的地质罗盘仪由磁针、水平仪和倾斜仪等部分组成,从结构上分为底盘、外壳和上盖,可用于识别方向、确定空间位置、山体坡度、测量地质构成,岩层走向、倾角等,是地质工作者必须掌握的工具。地质罗盘仪的磁针、磁针制动器、刻度盘、测...

MEMS技术的衍生产品MEMS加速度传感器,其加工工艺与传统的集成电路兼容,具有数字化、智能化、体积小、成本低、功耗低、可靠性高等特点,除了汽车、工业、军事、医疗等领域,目前随着MEMS的普及和量产,在很多电子产品中也可以看到他们的...

自动化立体仓库给各行业的发展带来了很大帮助,但在使用过程中立体仓库安全问题有很多需要注意的。立体仓库体现了现代物流仓储中较高的技术水平,实现了仓库高层合理化、存取自动化、操作简便化。立体仓库指采用高层货架配以货箱或托盘储...

基坑设计及施工难度大、技术复杂、风险高,基坑监测测斜仪可以在基坑开挖及地下工程施工过程中进行基坑监测,根据监测数据进行分析信息反馈,预判进一步发展及其影响程度,以便及时调整改进施工方法,制定应急措施,保证工程安全,实现信...
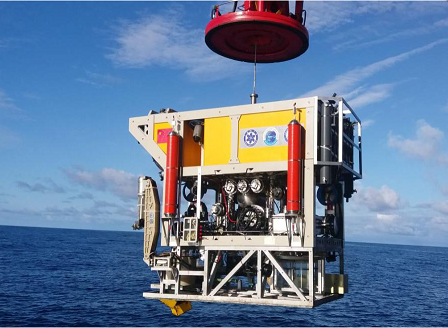
ROV导航通过ROV上的摄像机、声纳、磁探仪等设备仪器,收集水下音频影像数据传输至控制中心,进行水下定位识别和航向、姿态、速度的控制。ROV是遥控无人潜水器,可以代替人工到达恶劣的水下,完成观察、探测、施工等工作,在管道探测、海洋...
有关对产品安装、使用及维护等问题,
可以通过这里联系我们











版权所有 © 2017-2026 无锡北微传感科技有限公司 苏ICP备14001101号-3



